
Delta Math Robots
Delta Math Robots, Indeed recently has been hunted by consumers around us, perhaps one of you personally. People now are accustomed to using the internet in gadgets to view video and image information for inspiration, and according to the name of this article I will discuss about
If the posting of this site is beneficial to our suport by spreading article posts of this site to social media marketing accounts which you have such as for example Facebook, Instagram and others or can also bookmark this blog page.

Iq Robots For Android Apk Download Math Online Quizzes

Lego Delta Robot Scanning Drawing 7 Steps With Pictures Instructables Math Online Quizzes

Making An Arduino Controlled Delta Robot Matt Greensmith S Ramblings Math Online Quizzes
Https Www Ohio Edu Mechanical Faculty Williams Html Pdf Deltakin Pdf Math Online Quizzes

The Workspace Of A Delta Robot Download Scientific Diagram Math Online Quizzes

Delta Parallel Robot Arm Delta Robot 3d Printing Technology 3d Printing Math Online Quizzes
The lower arms are the sections of the three arms that are directly attached to the manipulator through ball joints.

Math online quizzes. The workspace is a cylinder measuring 1300 mm in diameter and 500 mm high. Most delta robots have at least a fourth axis enabling objects to be rotated. A delta robot is a type of parallel robot that consists of three arms connected to universal joints at the base.
The upper arms of the robot are the sections of each of the three arms that are directly and rigidly attached to the motors. Call the helper function which builds the robot model and outputs the rigidbodytree object. Delta x is the cheapest but most effective delta robot in the world.
Normally delta robots contain closed loop kinematic chains. Delta robots have popular usage in picking and packaging in factories because. Rotary delta robot forwardinverse kinematics calculations.
An improved approach to the kinematics of clavels delta robot. We use this program to design our delta robots. Im trying to put together a simple simulation for a delta robot and id like to use forward kinematics direct kinematics to compute the end effectors position in space by passing 3 angles.
So i thought why not a drawing delta robot. The quattro boasts a pick rate of 300 picks per minute. To avoid this the robot is modeled as a tree with the arms of the delta robot remaining unconnected.
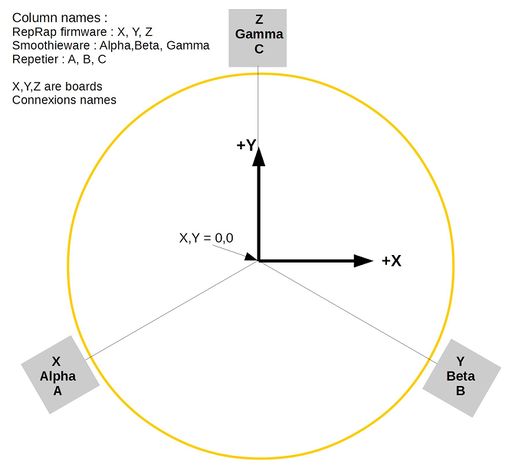
Tweak your robot dimensions and see how it will affect your work envelope and your precision. The math a note on convention. Then adjust your motor angles thetas or your tool position xyz and see that the forward and inverse kinematics match.
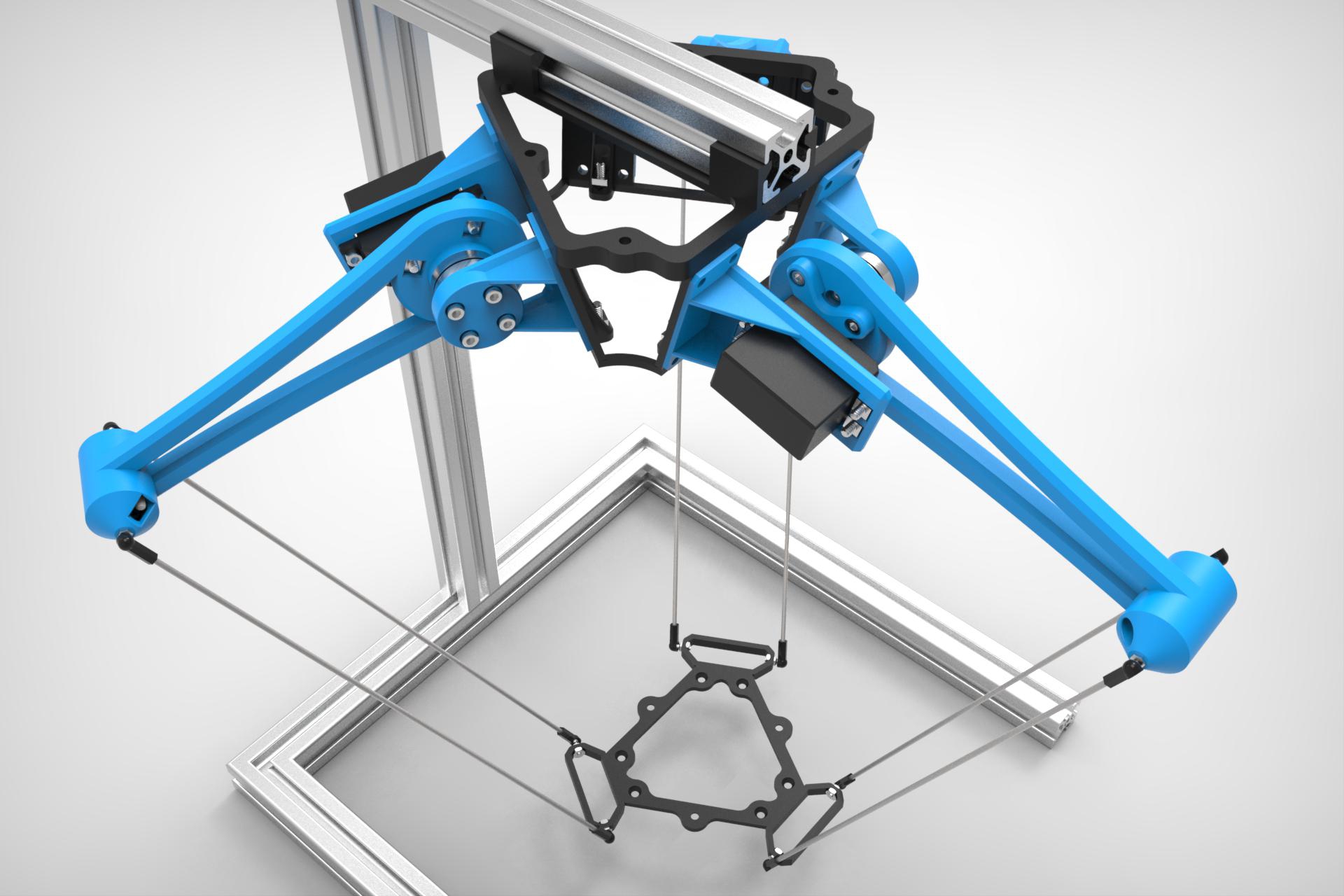
Tripod positioners such as the spoonpod the helium frog delta robot and viktors tripod repstrap demonstrator have many similarities to delta positioners as does the trap. Im lost at the last part in. A delta robot or printer is a robot where a platform is maintained by three pair of arms set in a triangle.
The pick rate of the fanuc m 2ia another delta robot comes in at 182 picks per minute. If you are building a. The omron adept quattro a unique four armed delta robot is capable of a maximum speed of 10 ms with a payload of 6 15 kg depending on the model.
Ive started with the trossen robotics forum delta robot tutorial and i can understand most of the math but not all. Includes both delta inverse kinematics and closed form delta direct kinematics. The main benefit of delta robots is that the heavy motors are fixed on the frame allowing the moving parts of the robot to be very light.
Delta x customers are educational institutions research centers and small manufacturing businesses. The pairs of parallel arms maintain the horizontality of the platform and the movement of these arms displace the platform in the three dimensions. The key design feature is the use of parallelograms in the arms which maintains the orientation of the end effector by contrast to stewart platform that can change the orientation of its end effector.
In contrast each motor of an articulated arm robot carries the weight of all the successive motors.
Could A Delta Printer Like This Work Repetier Forum Math Online Quizzes

Making An Arduino Controlled Delta Robot Matt Greensmith S Ramblings Math Online Quizzes
Delta Geometry Reprap Math Online Quizzes
Dainty Delta Is About As Small As A Robot Can Be Hackaday Math Online Quizzes